Daniel Wijaya
Some of my Engineering projects and experience.
Work Experience
↑ Back to top- 2026 - Present ▸ Sr. Reliability Engineering Specialist | Mosaic Manufacturing
- 2024 - 2025 ▸ Reliability Engineering Specialist | Mosaic Manufacturing
- 2023 - 2024 ▸ Applications Engineering Specialist | Mosaic Manufacturing
- 2021 - 2023 ▸ Mechanical Engineering Designer | Mosaic Manufacturing
- 2020 - 2021 ▸ Research Assistant | Center of Human Development and Disability, UW
- 2019 - 2020 ▸ Commodity Management Associate Internship | Celestica
- 2017, 2018 ▸ Research Intern | Behavioral and Cognitive Neuroscience Institute, SFU
Projects
Some of the projects that I've worked on.↑ Back to top
Personal Project: Leviosa
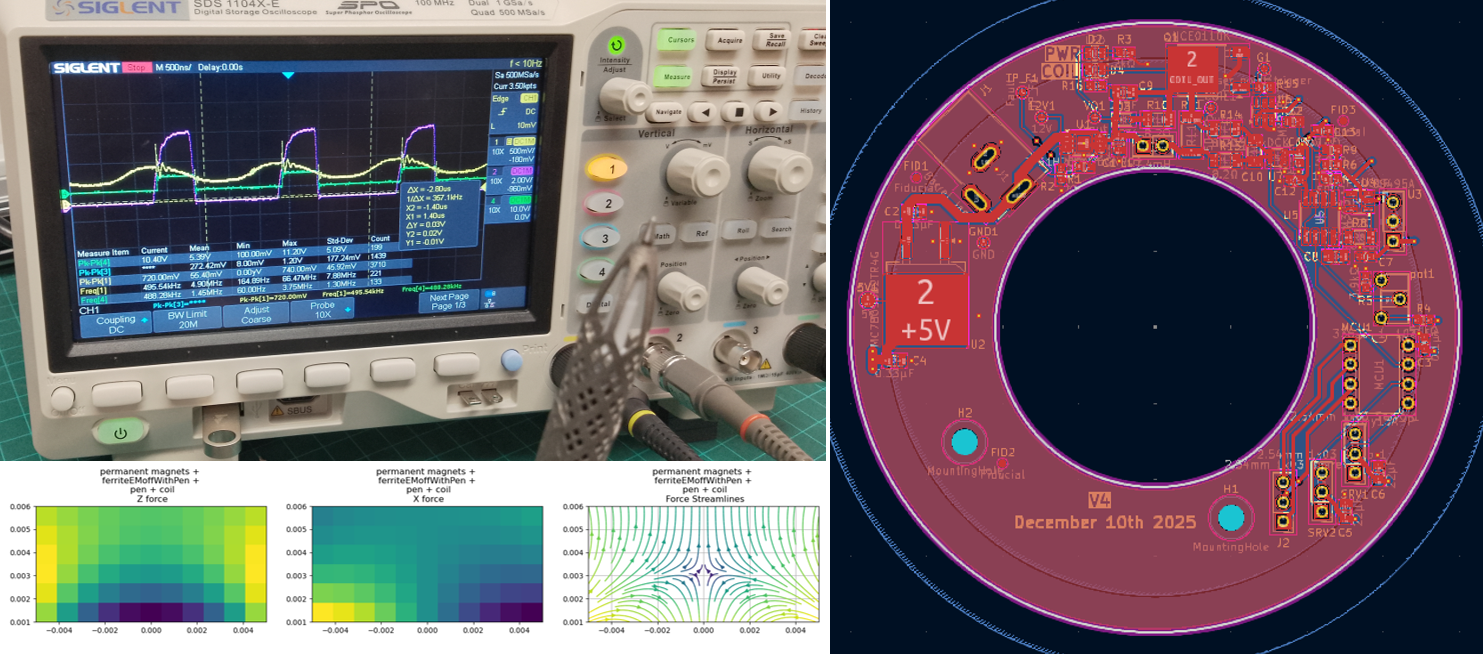
Goal: Create a floating pen
Outcomes: Created platform to float pen using passive magnets & electromagnets. Currently refining PCB and system capabilities.
Skills used: Python (physics simulation, monte carlo), RCA, Oscilloscope, DMM, KiCAD, OnShape, Additive Manufacturing
Project Github
Personal Project: 3DP Origami
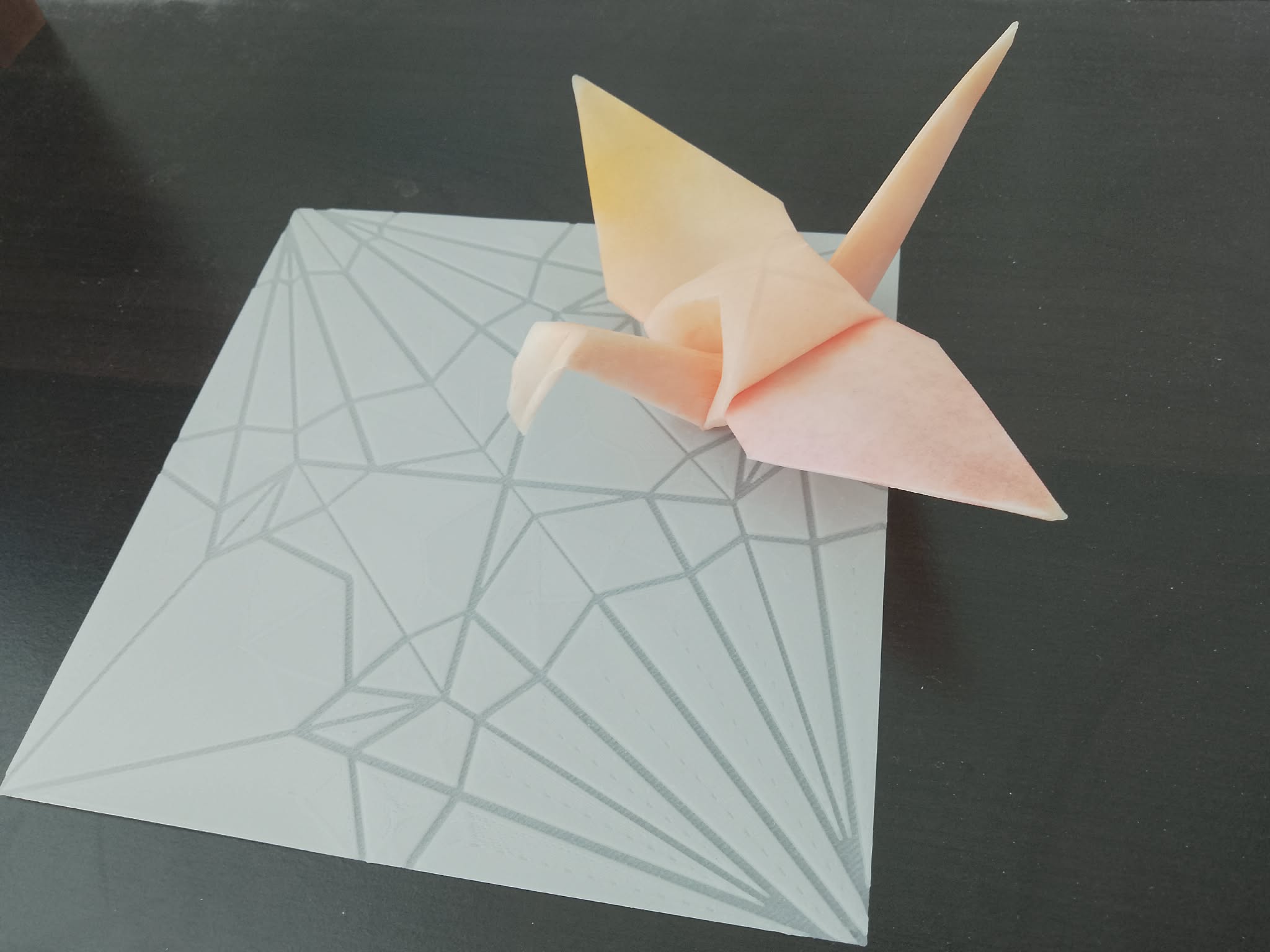
Goal: Creation of 3DP origami with consideration for non-zero thickness folds.
Outcomes: Creation of patterns and parameterized folds to create a limited set of origami.
Skills used: OnShape, Additive Manufacturing
OnShape File
Personal Project: Robotic Arm
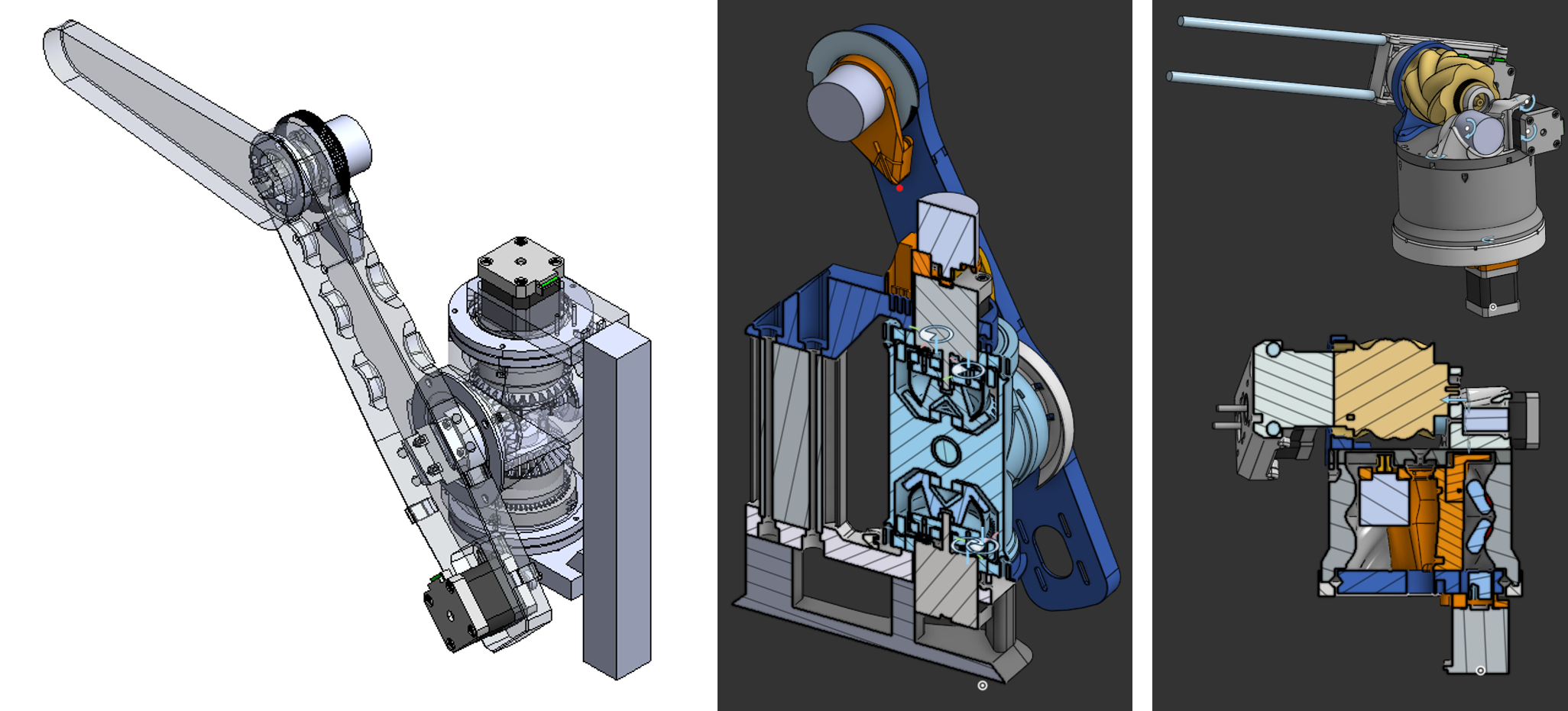
Goal: Personal project to create a low-cost robotic arm for testing control systems and path planning workflows
Outcomes: Iteration 1 created and failure points identified. Iteration 2 CAD and build in-progress.
Skills used: OnShape & SolidWorks (CAD, motion planning), Arduino, DMM
Project Github
Personal Project: Kaggle Cassava Leaf Disease Competition

Goal: classification of Cassava images into four diseases categories or a fifth healthy plant category. Tensor processing units (TPUs) and transfer learning were used.
Outcomes: algorithm achieved 89.1% accuracy
Skills used: Python
Kaggle Notebook
Capstone: CSA STRATOS balloon separator
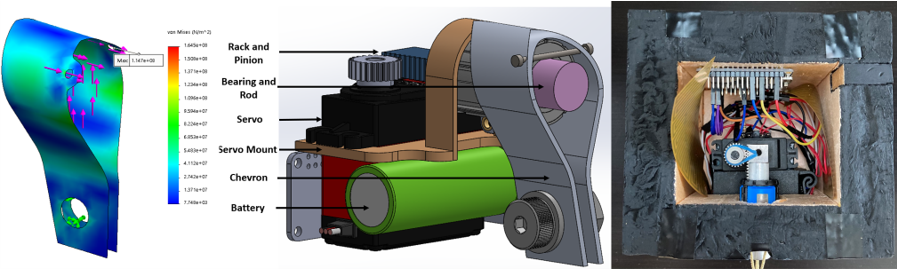
Goal: Design and build a separator to detach the balloon from the payload per signal input or when the balloon bursts.
Outcomes: Goals fulfilled.
Skills used: SolidWorks (CAD & FEA), Arduino, DMM
Neural Probe Testing
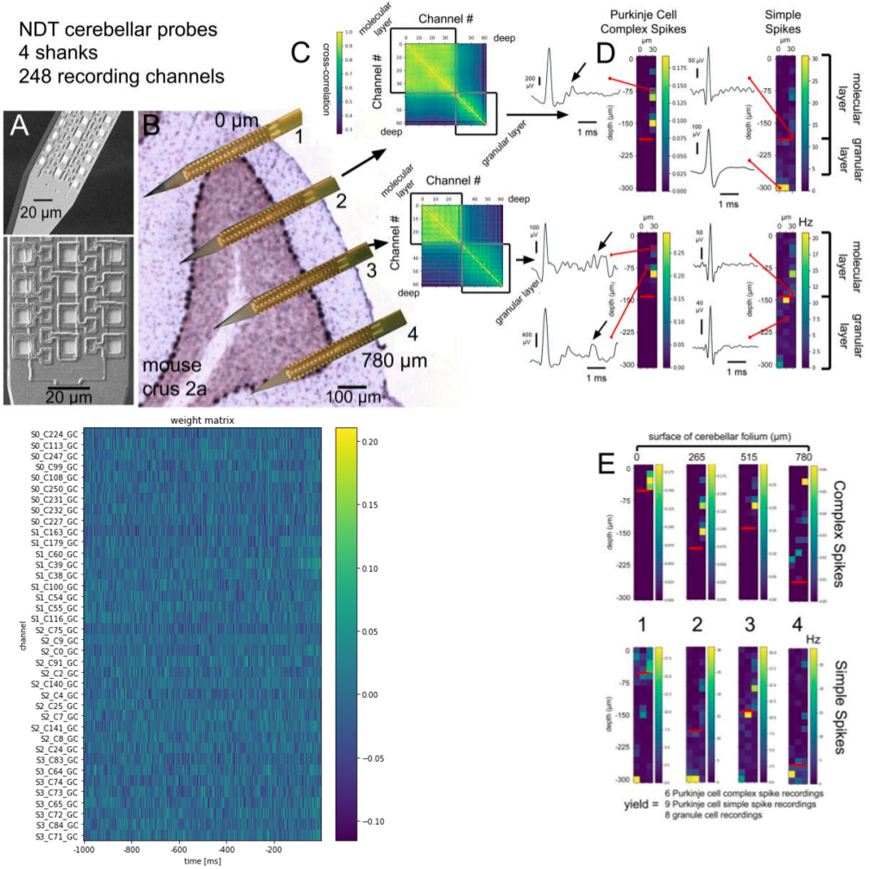
Goal: Pre-process provided neural data, detect and sort neural spikes, determine spike correlation between sensors, and mapping relationships between the granular and molecular layers of the brain.
Outcomes: Scripts created to achieve goals above.
Skills used: Python (signal processing and analysis)
Personal Project: Mechanical Hand
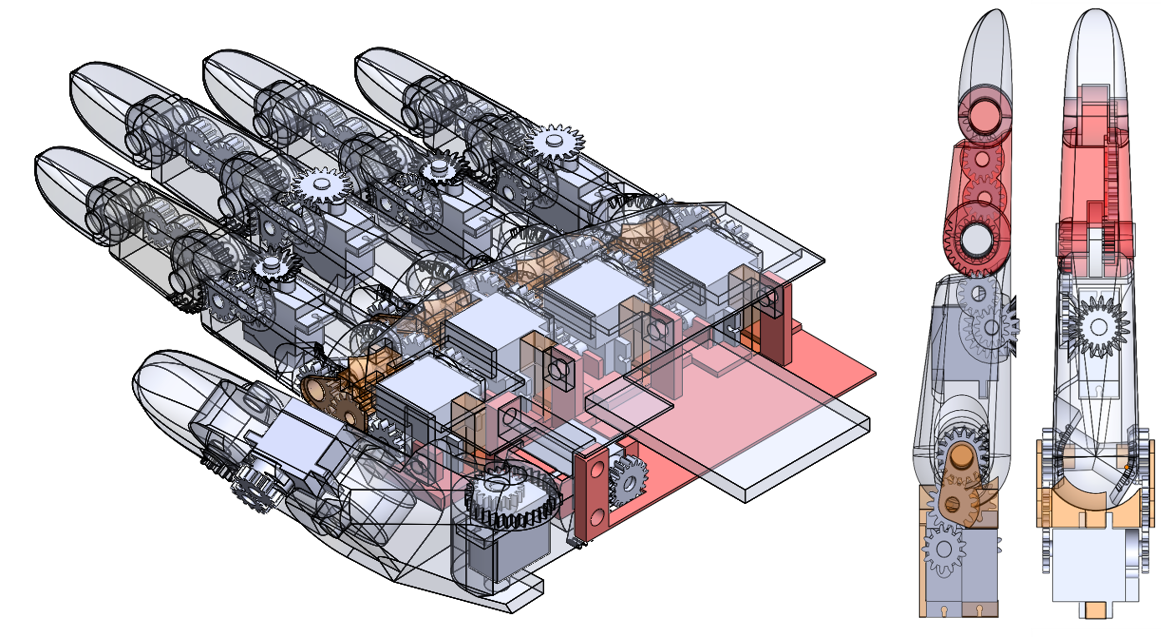
Goal: Personal self-directed project to create a mechanical human hand analog using servos.
Outcomes: CAD & Arduino code completed, Finger Subassemblies manufactured and assembled.
Skills used: SolidWorks, Arduino, Additive Manufacturing
Design Team: AERO McGill
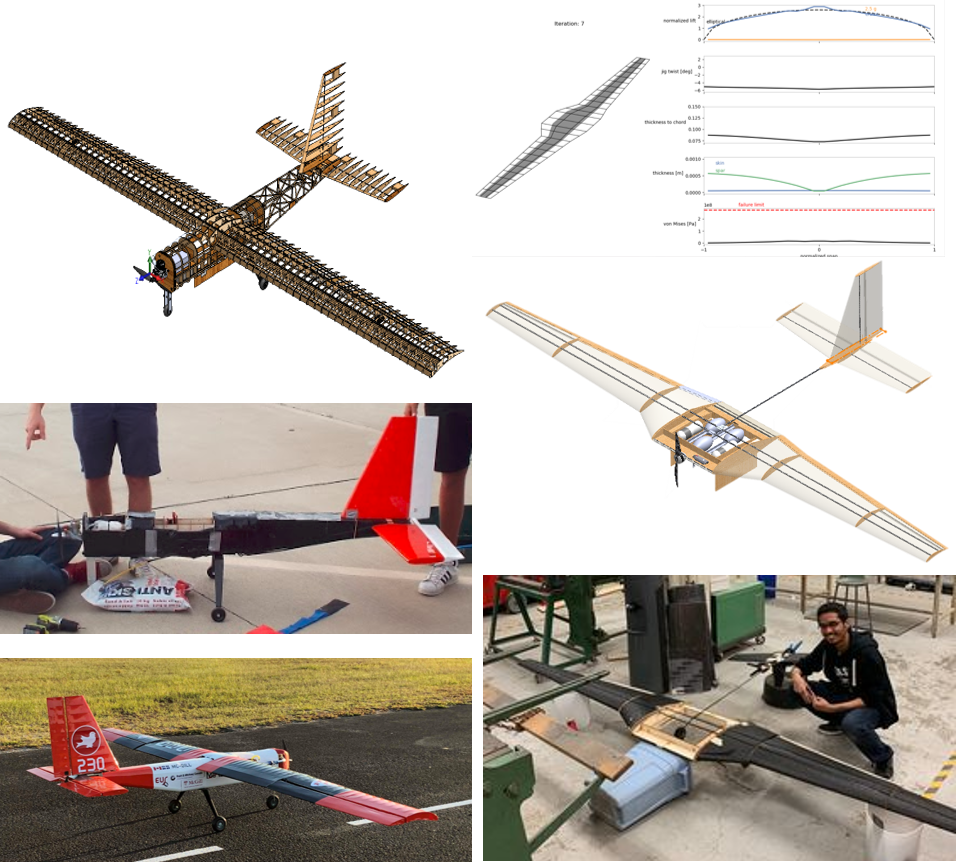
Goal: Design a remote controlled aircraft for the SAE Aero Design competition.
Outcomes: Participation in SAE competitions. Fulfilled roles as sub-team lead, VP logistics, and co-captain over 3 years.
Skills used: SolidWorks, CFD, Lasercutter, Additive Manufacturing,
Internship Project: Optically Pumped Magnetometer (OPM) “Helmet” System
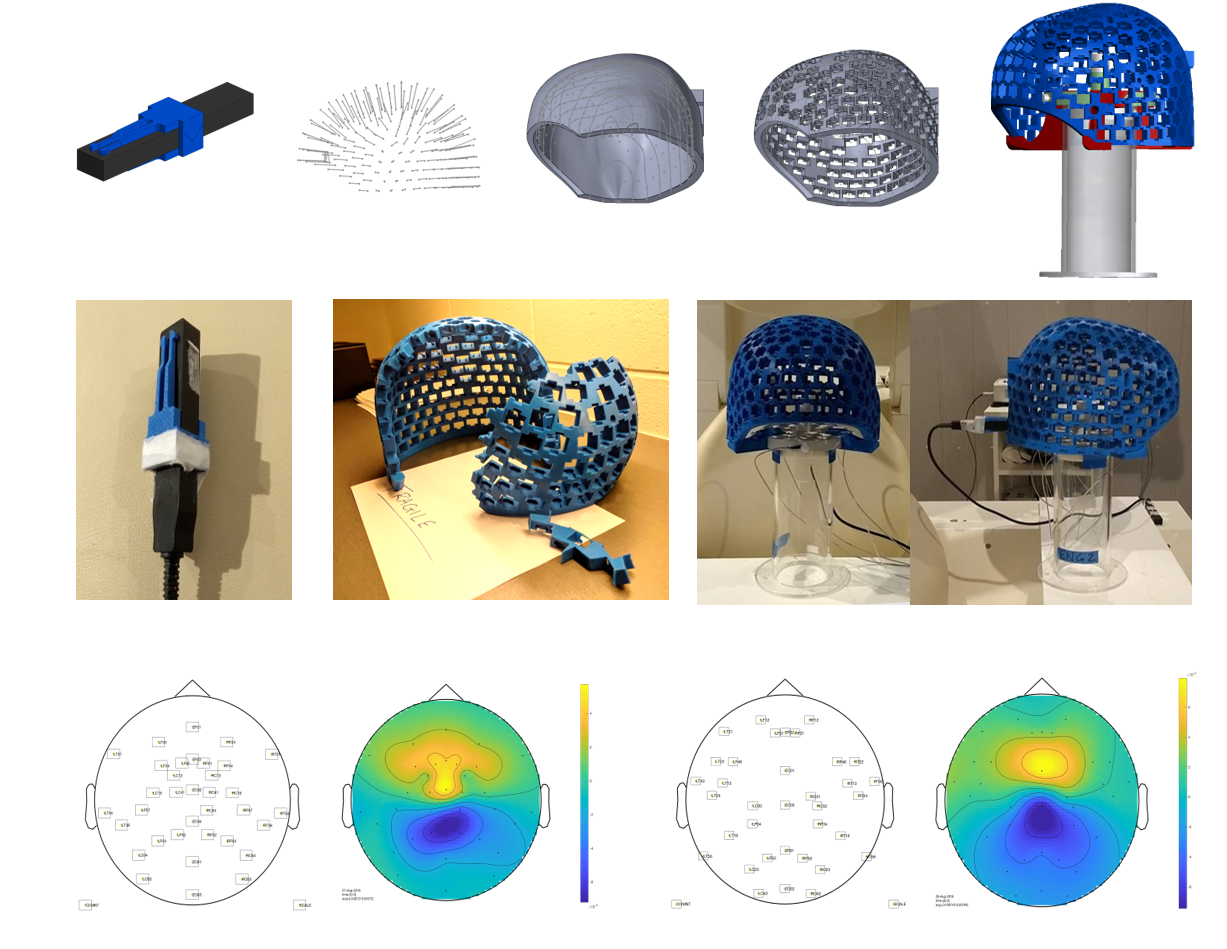
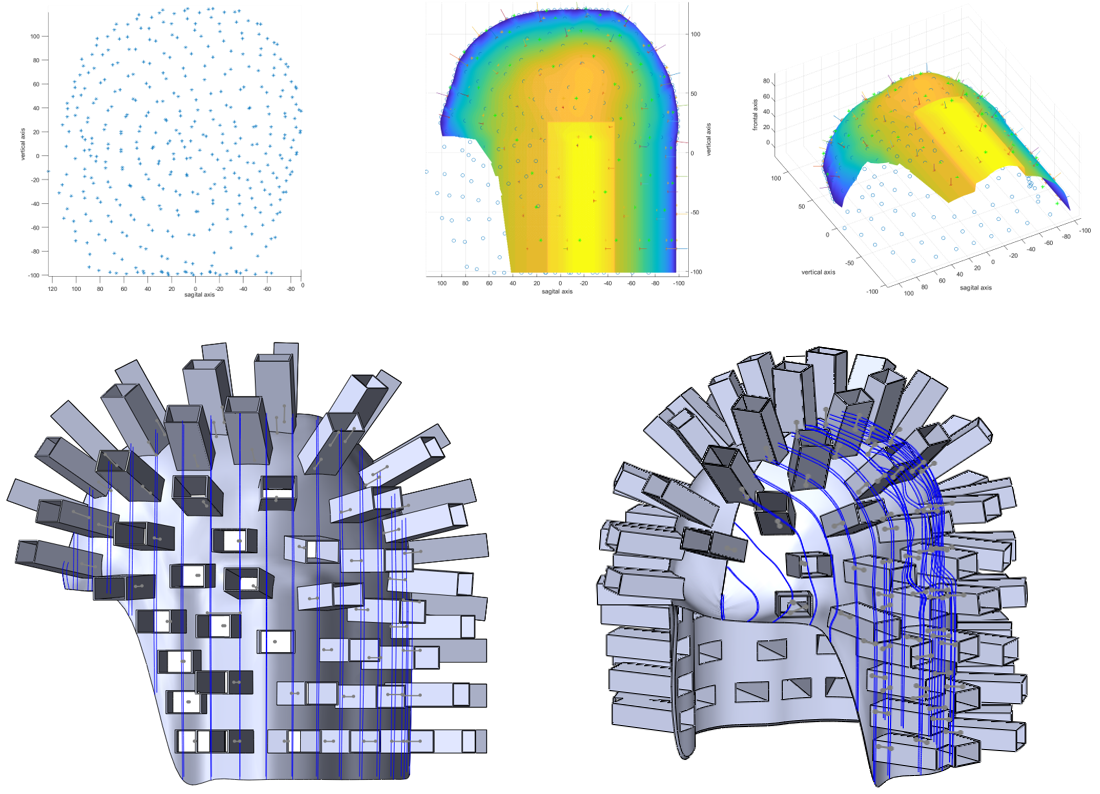
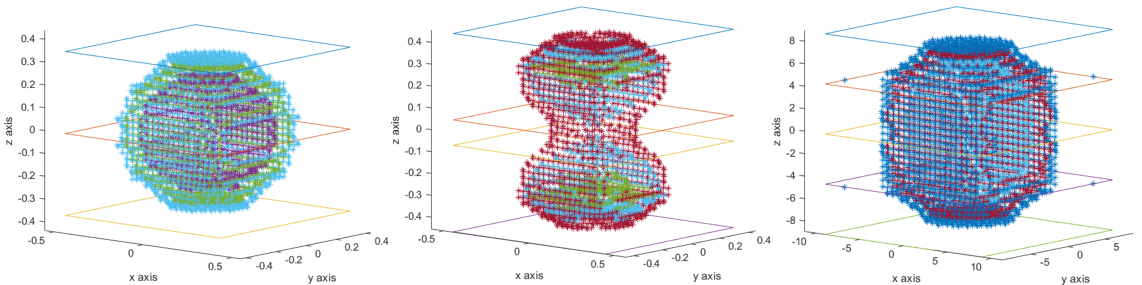
Goal: Develop rig maximizing signal to noise ratio (SNR). Validate system.
Outcomes: Rig designed and workflow created to automatically generate patient-specific sensor arrays. System validated using a magnetic dipole. Investigated use of coils for active shielding.
Skills used: Python, SolidWorks, VBA
2018 OHBM Poster
Internship Project: Cervical Spine Co-registration Jig
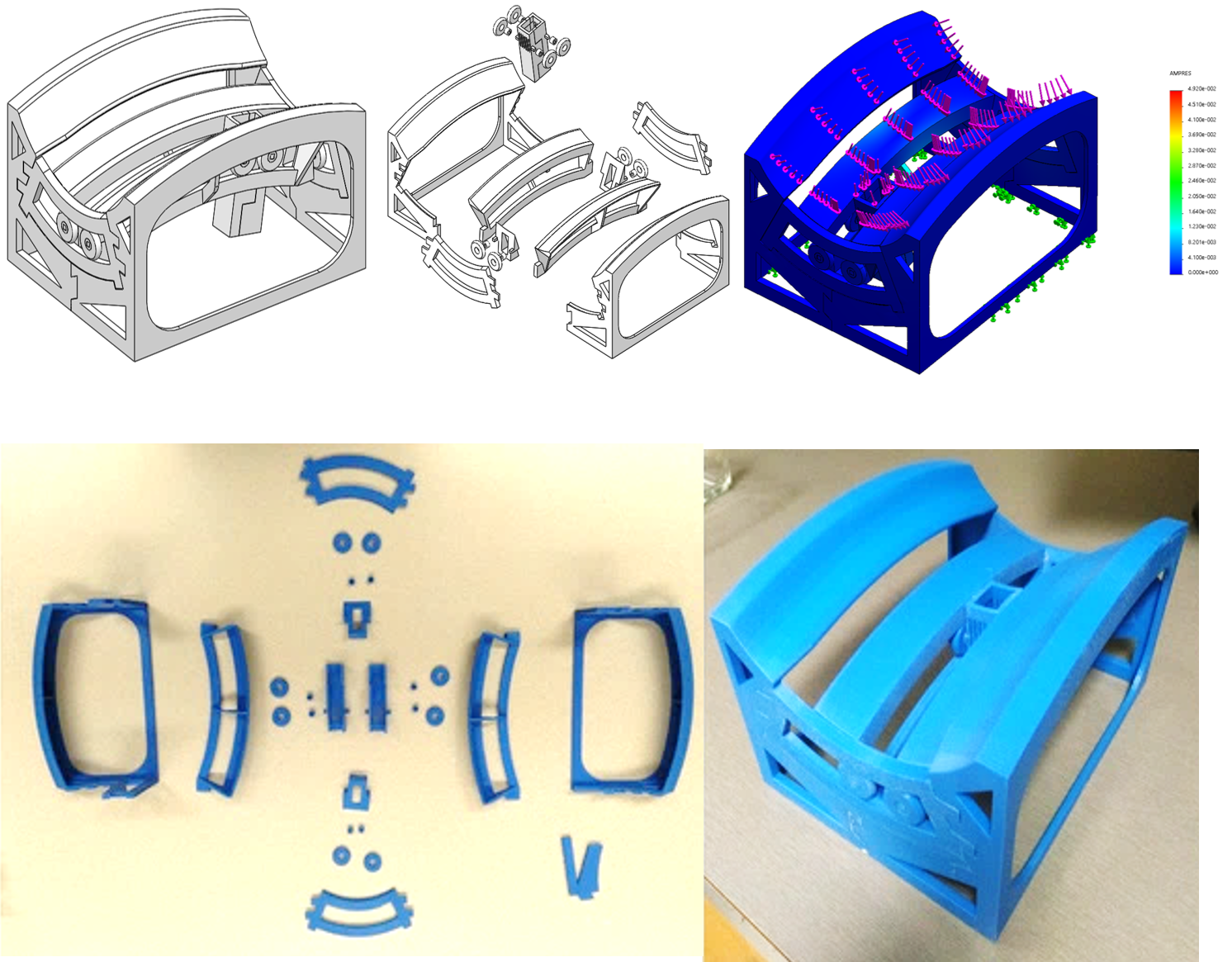
Goal: Develop workflow to enable co-registration of Magnetoencephalography (MEG) Optically Pumped Magnetometer (OPM) (has high temporal resolution) with MRI (has high spatial resolution)
Outcomes: Rig designed and workflow created to automatically generate patient-specific sensor arrays. System validated using a magnetic dipole. Investigated use of coils for active shielding
Skills used: Python, SolidWorks, VBA
Internship Project: Cervical Spine Co-registration Jig
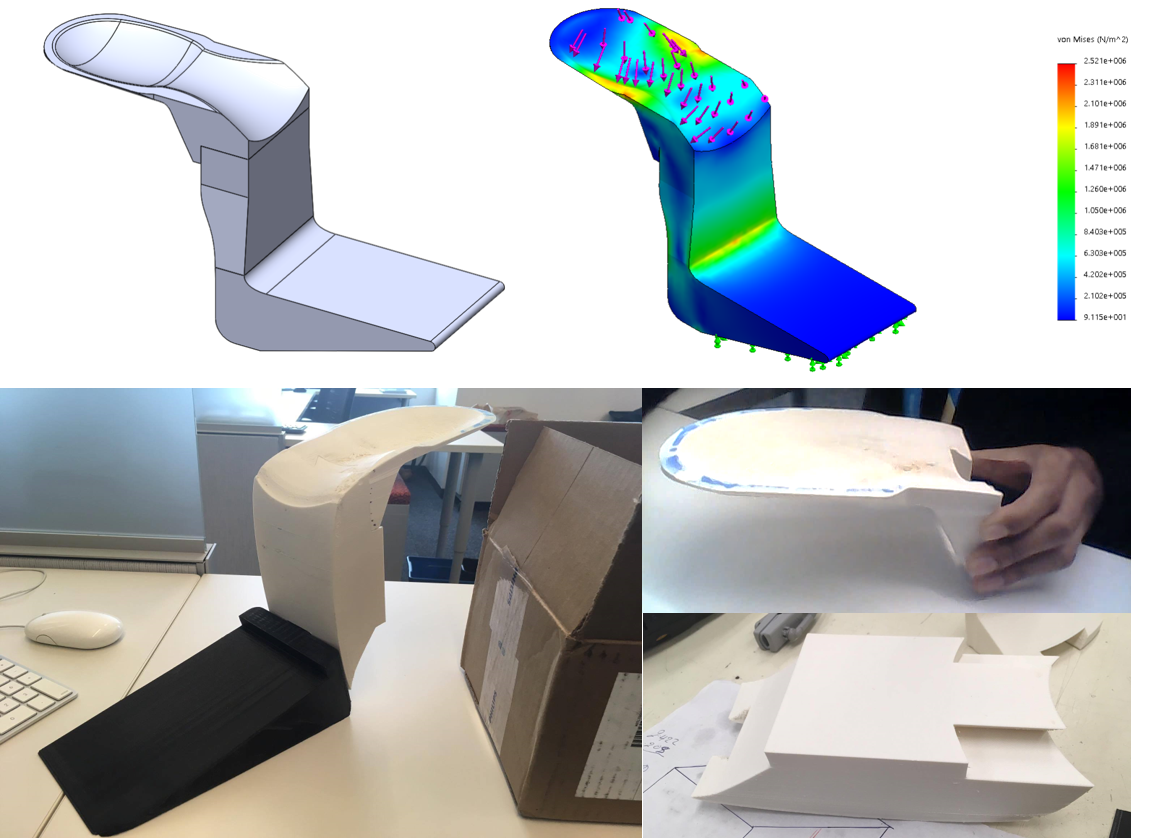
Goal: secure young patients who may have a history of seizure, a headrest component needed to be designed for the CTF MEG.
Outcomes: Rig printed by U of T lab affiliated with Sick Kids for use.
Skills used: SolidWorks (CAD & FEA)